Calibration of the IR Sensors
Why Calibration is Required?
Calibrating the sensors is perhaps the most important part of this task. Do you know why? Because if the sensors are not calibrated, the robot might not do what it has been asked to, i.e. follow the enemy. Before getting started, you need to take two steps backs and understand what an IR sensor is and how it works.
An IR sensor is a proximity sensor or a ‘nearness’ sensor that detects objects within a given distance, without touching them. The sensor you’re using detects objects present within a range of 5-10 cm from it.
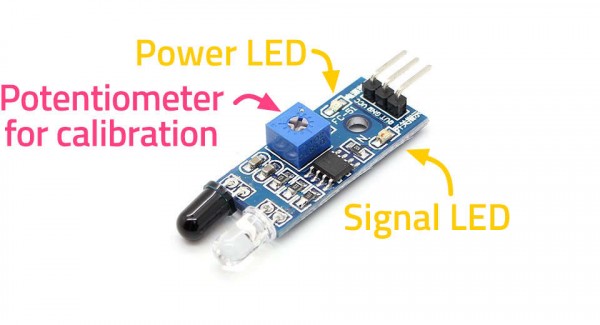
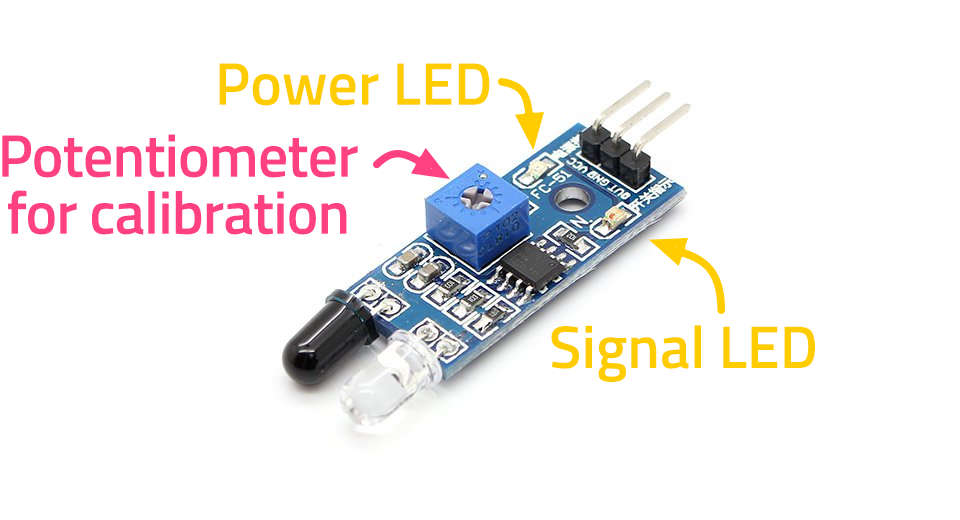
An IR sensor has two small LED indicators – one for power, which is ON the entire time the sensor is ON; the other is the Signal LED which detects the object. The signal LED has two states or situations:
- ON (Active) when it detects an object
- OFF (Inactive) when it doesn’t detect any object
Now, do you realize why you needed this information?
Calibrating the sensor, essentially, is making sure that the LED turns ON when it detects the object and turns OFF when it doesn’t. That’s it.
Calibration
Now, to calibrate your sensor, place an object at least 15cm away from the robot. If the signal LED is OFF, the sensor is working properly. Otherwise gently turn the potentiometer (that tiny blue cube with a screw in it) with a screwdriver in the anti-clockwise direction such that the LED turns OFF.
Similarly, place an object about 5cm from the sensor. If the signal LED is ON, then it is working properly. Otherwise turn the potentiometer in the clockwise direction such that the LED turns ON.
And you’re done; your sensor is calibrated.